
I am a passionate researcher and engineer working at the intersection of Robotics and Embodied AI. I graduated from Shanghai Jiao Tong University (ARWU30, QS 36, US News 37, THE 40), where I was advised by Prof. Danping Zou and Prof. Wenxian Yu at SJTU-VISYS Lab.
I have also been fortunate to work with Prof. Chuang Gan as a research intern at the MIT-IBM Watson AI Lab, and with Prof. Fu Zhang during SRP2023 at HKU MaRS Lab. Previously, I spent productive and memorable time at Tencent Robotics X Lab, Shanghai AI Lab IPEC group, and Shanghai Beidou Research Institute, working on robotics and intelligent systems.
My work has appeared in leading robotics and AI venues, including ICRA, IROS, RA-L, CVPR, TRO, TAES, and GPS Solutions. My research has been supported by the National Key R&D Program and the NSFC. Representative projects include M2DGR, Ground-Fusion, DAF, Ground-Fusion++ / M3DGR and so on, with Google Scholar citations. I am also an active open-source contributor, with GitHub stars across my projects.

News
- 06.2026 🏆 We release Ultra-Fusion, a SOTA SLAM framework on wheeled/legged/aerial robots and autonomous cars! [Code]
- 06.2026 NIDAR is accepted to IROS2026!
- 02.2026 In-P3VIO is accepted to TAES2026!
- 06.2025 LIGO is successfully transfered to IROS2025!
- 06.2025 Ground-Fusion++/M3DGR isaccepted to IROS2025!
- 01.2025 M2DGR is awarded ESI Highly Cited Paper(Top 1%)!
- 01.2025 LIGO is accepted to TRO2025!
- 06.2024 DAF is accepted to IROS2024!
- 03.2024 Ground-Fusion is accepted to ICRA2024!
- 03.2024 EN-SLAM is accepted to CVPR2024!
- 03.2024 A paper is accepted to GPS Solutions!
- 08.2023 M2C-GVIO is accepted to Satellite Navigation!
- 06.2023 I won the HKU Summer Research Programme Scholarship!
- 12.2021 M2DGR is accepted to RAL and ICRA2022!
Research Themes
My research spans multi-sensor fusion SLAM, multi-modal reasoning, and whole-body control — building robust perception and embodied autonomy for real-world robots.
Multi-sensor Fusion SLAM
Fusion frameworks and benchmarks for robust localization under sensor failure and outdoor corner cases.

Whole-body Control
Whole-body control coordinating navigation, balance, and manipulation for mobile robots in human environments.
Publication
Currently, I focus on reinforcement learning, dexterous manipulation, and whole-body control. My long-term goal is to build practical intelligent robots that can operate safely and reliably in human environments, assisting people with everyday physical tasks. Previously, I worked on multi-sensor fusion SLAM(algorithms and benchmarks) and multi-modal reasoning. Representative works are highlighted.
 | Ultra-Fusion: A Resilient Tightly-Coupled Multi-Sensor Fusion SLAM Framework under Sensor Degradation and Spatiotemporal Perturbation for Intelligent Transportation Systems Representative Work arXiv preprint 2026 |


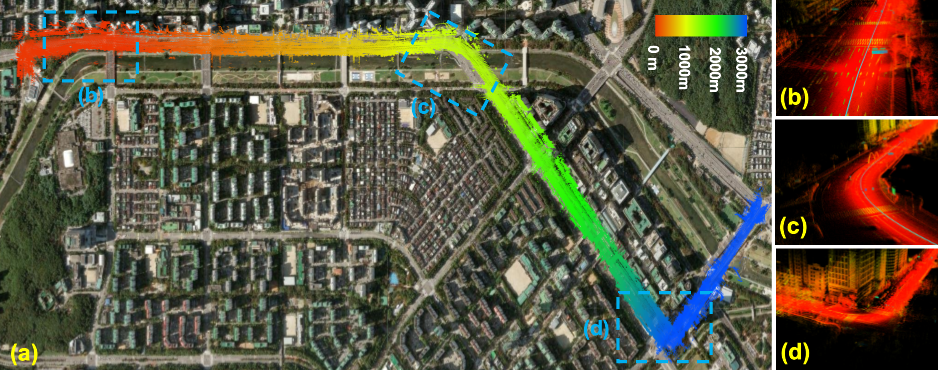
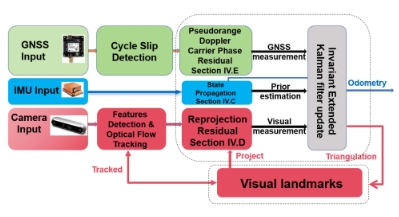 | In-P3 VIO: Tightly-Coupled PPP-Visual-Inertial Odometry Based on Invariant Filter Approach IEEE Transactions on Aerospace and Electronic Systems 2026 |
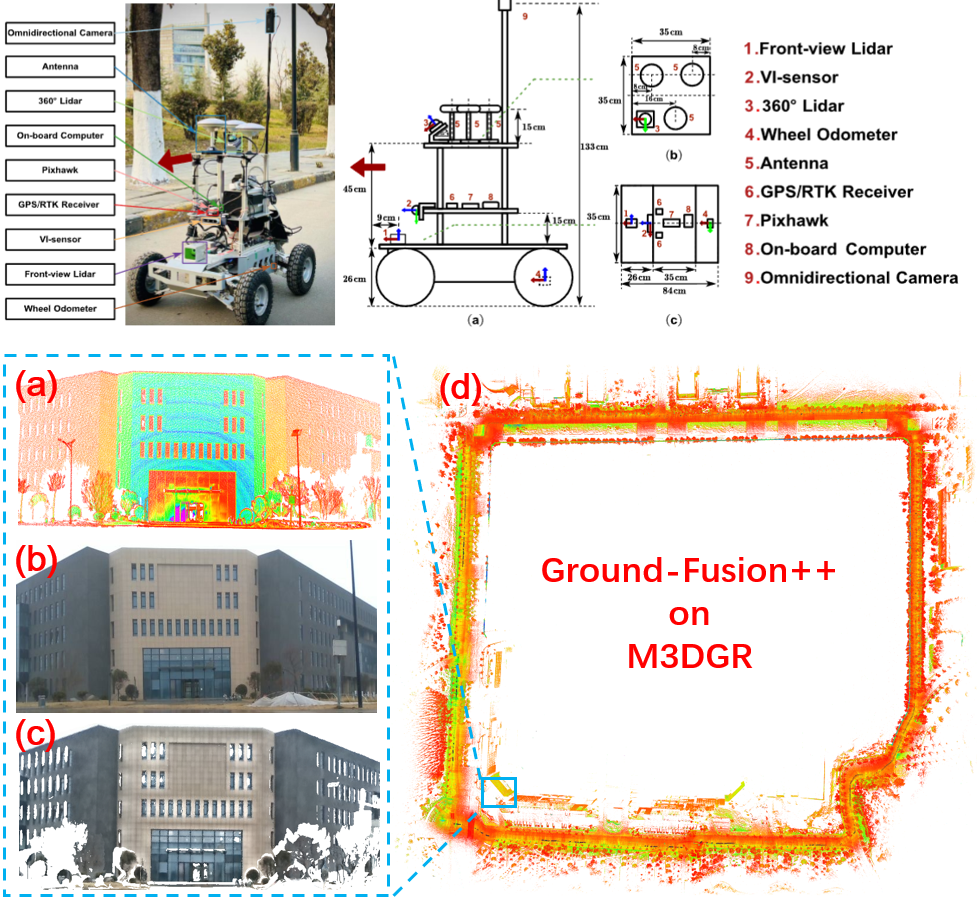 | Towards Robust Sensor-Fusion Ground SLAM: A Comprehensive Benchmark and A Resilient Framework IROS 2025 |

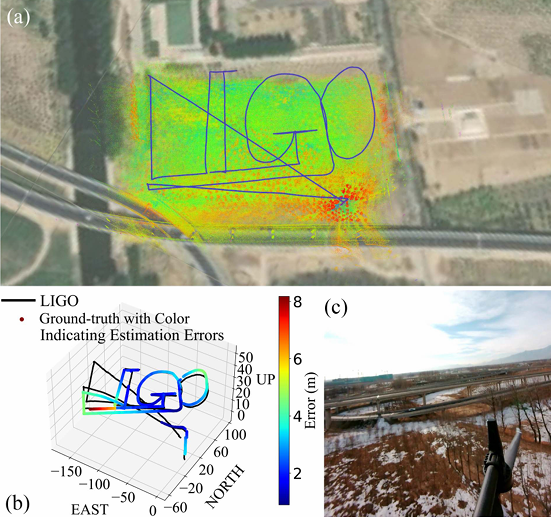 | LIGO: A Tightly Coupled LiDAR-Inertial-GNSS Odometry Based on a Hierarchy Fusion Framework for Global Localization With Real-Time Mapping |

 | Disentangled Acoustic Fields For Multimodal Physical Scene Understanding Representative Work IROS 2024 (Internship at MIT-IBM AI Lab) |


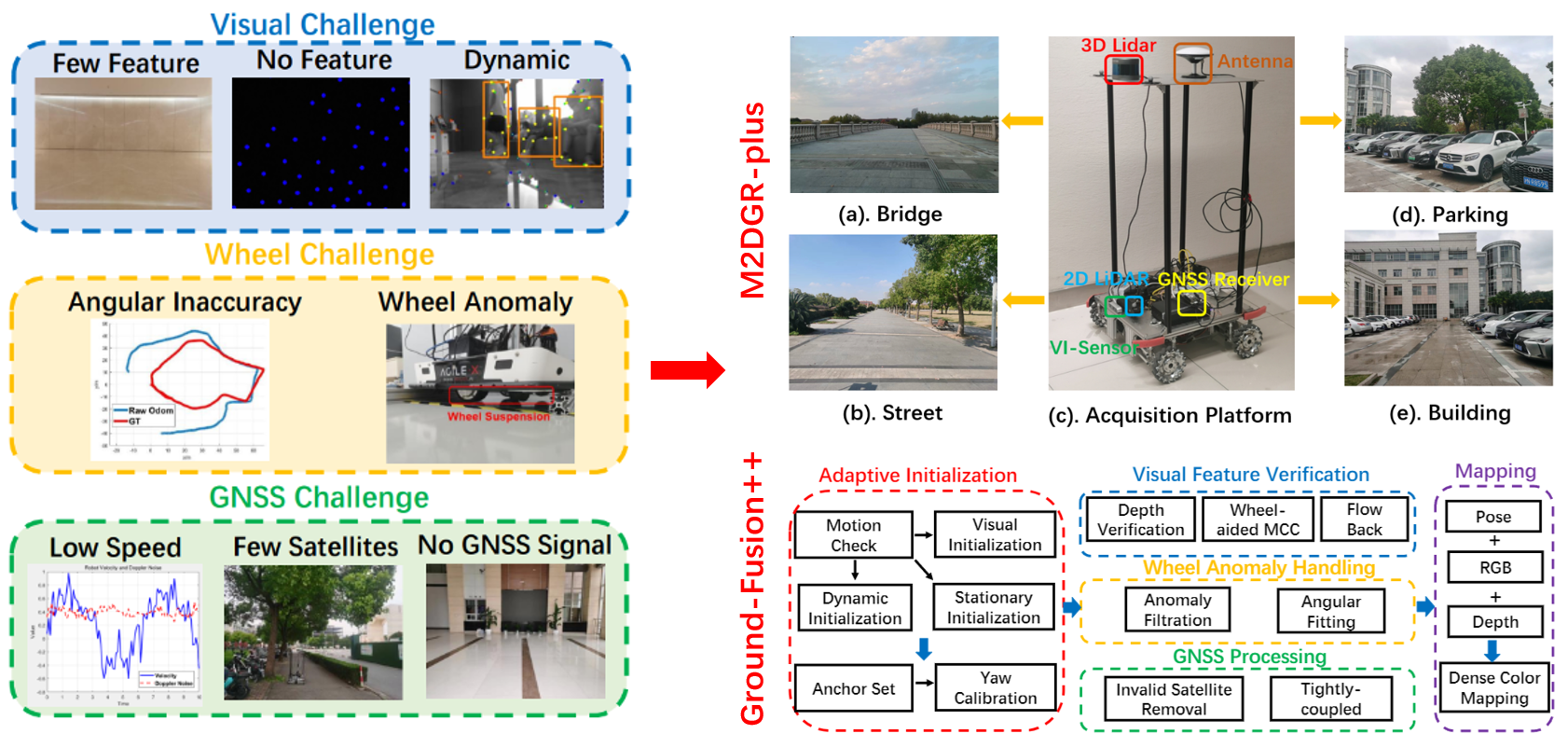 | Ground-Fusion: A Low-cost Ground SLAM System Robust to Corner Cases Representative Work ICRA 2024 |


 | Implicit Event-RGBD Neural SLAM (CVPR Highlight) CVPR 2024 (Internship at Shanghai AI Lab) |

 | Innovation-based Kalman filter fault detection and exclusion method against all-source faults for tightly coupled GNSS/INS/Vision integration |
 | Sky-GVINS: a Sky-segmentation Aided GNSS-Visual-Inertial System for Robust Navigation in Urban Canyons Geo-spatial Information Science (JCR Q1) 2023 |

 | M2C-GVIO: motion manifold constraint aided GNSS-visual-inertial odometry for ground vehicles |
 | M2DGR: A Multi-Sensor and Multi-Scenario SLAM Dataset for Ground Robots(ESI Highly Cited Paper, Top 1%) Representative Work RA-L 2021 (SJTU-Beidou Joint Training Program) |

Projects
 | Design, Sensing and Control of Service Robotic System for Intelligent Navigation and Operation in Internet Data Centers (Reddot Design Award2022) IEEE CASE 2022 (Internship at Tencent Robotics X Lab) |
 | Ground-Challenge: A Multi-sensor SLAM Dataset Focusing on Corner Cases for Ground Robots |

 | A GNSS-Visual-IMU benchmark Dataset for SLAM Github 2022 |

Academic Service
- Conference reviewer for ICRA(2023-now) and IROS (2023-now) .
- Transaction reviewer for IEEE RA-L(2022-now),IEEE TRO(2024) and IEEE TASE(2024-now).
Honors
- HKU Summer Research Programme (SRP) Scholarship 2023
- Academic Scholarship (2018, 2020, 2022, 2023) in SJTU
- Outstanding Graduate of SJTU 2021
- Third Prize in National English Competition for College Students(NECCS) 2018
Teaching
- Teaching assistant for Visual Localization & Perception (EE382) in SJTU.
- Course tutor on SLAM in CVLIFE.